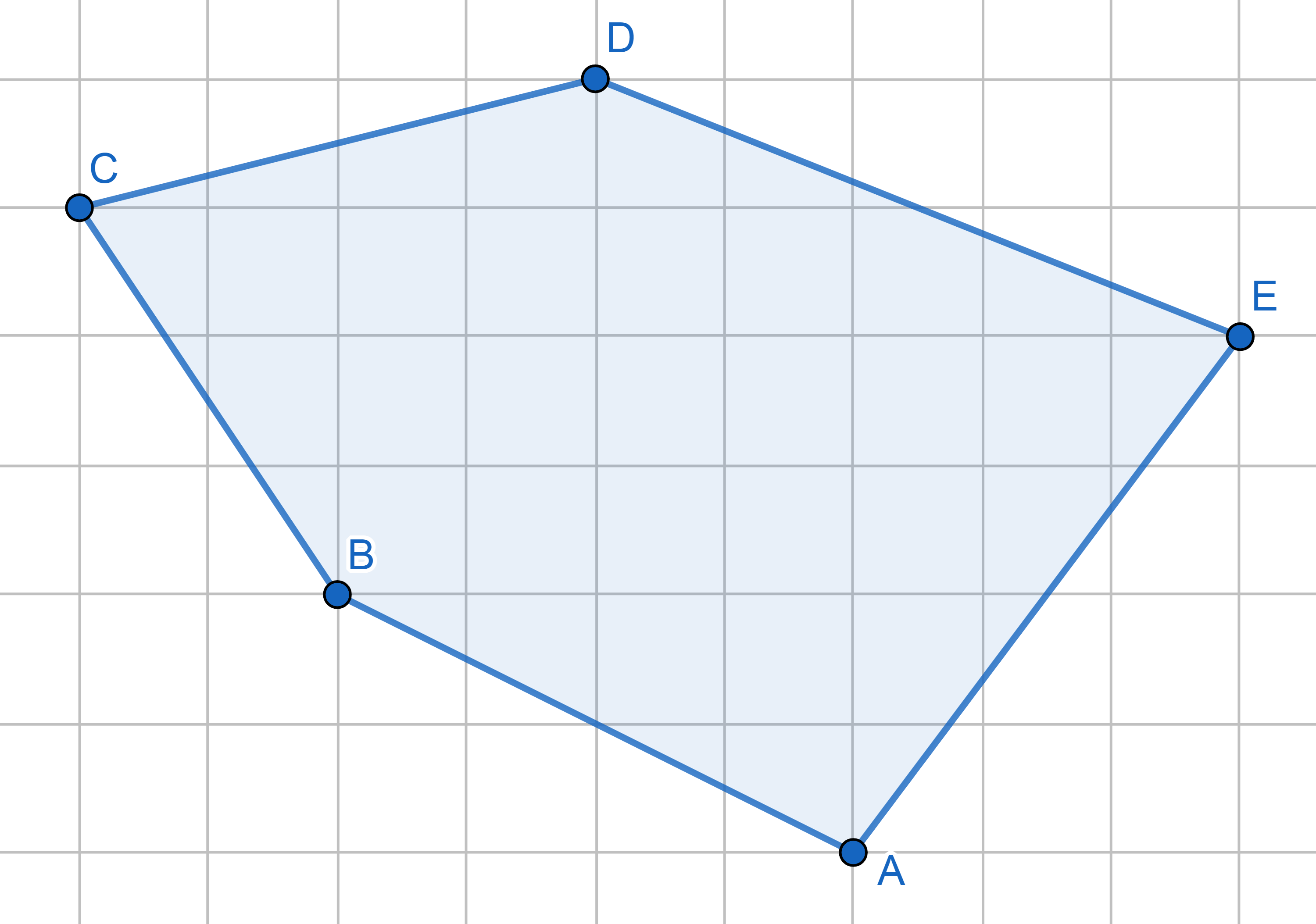
Considérons un certain nombre de points dans un repère : comment déterminer une droite qui approche au mieux ces points ? Pour aborder correctement ce problème, il faut déjà définir ce que signifie l’expression « approcher au mieux » et pour cela il faut décider d’une règle permettant de mesurer les écarts entre les points et la droite. On va convenir de mesurer ces écarts parallèlement à l’axe des ordonnées comme dans l’illustration dynamique ci-dessous :
Dans cette illustration, on considère cinq points 


Ce problème a déjà été étudié et résolu lorsque l’on décide de considérer plutôt les carrés des écarts : c’est la méthode des moindres carrés indépendamment élaborée par Legendre et Gauss au début du 19-ème siècle. L’objectif de cet article est toutefois différent, il s’agit d’examiner ce qui se passe lorsque l’on décide de ne pas mettre au carré les écarts.
La question à présent est claire : comment choisir les points 


Peut être avez-vous trouvé cette réponse surprenante à force d’essayer : il faut aligner les points 





Appliquons ce théorème dans l’exemple proposé en introduction :
On va choisir au hasard 











On peut résumer les calculs précédents en disant que le théorème a généré la suite de quatre points : 
def horizon(points,indice):
pts = [[(points[i][1] - points[indice-1][1])/(points[i][0] - points[indice-1][0]),points[i][0],points[i][0] - points[indice-1][0],i+1] for i in range(len(points)) if i != indice-1]
total = 0
for pt in pts:
total += abs(pt[2])
pts.sort()
somme = 0
for i in range(len(pts)):
somme += abs(pts[i][2])
if somme >= total/2:
reponse = pts[i][3]
break
return reponse
def coupleSym(points, indice=1):
indices = []
while indice not in indices:
indices.append(indice)
indice = horizon(points,indice)
indices.append(indice)
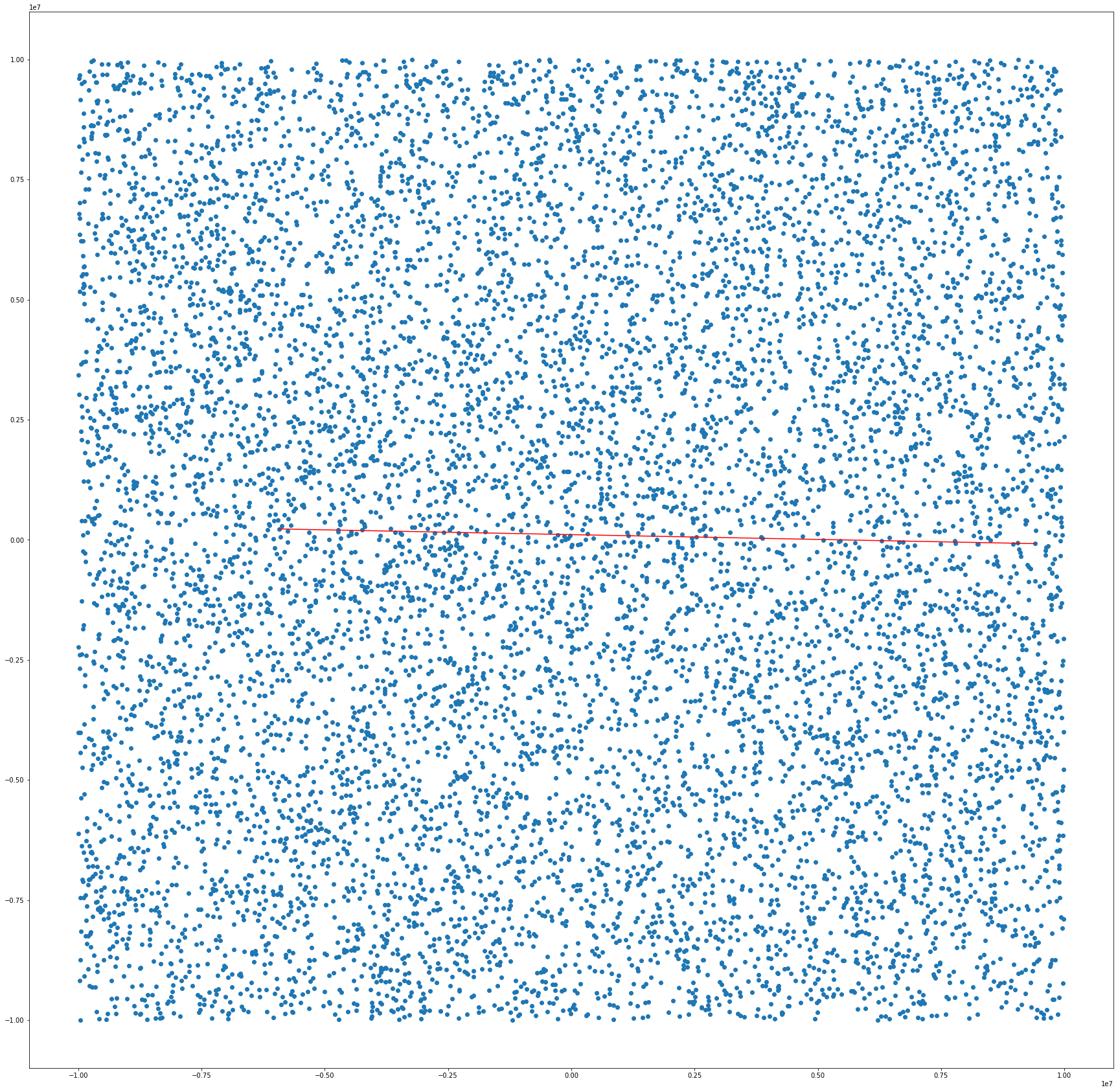
return indicesCe code a été utilisé pour déterminer le couple de points qui définit la droite optimale avec un ensemble de 
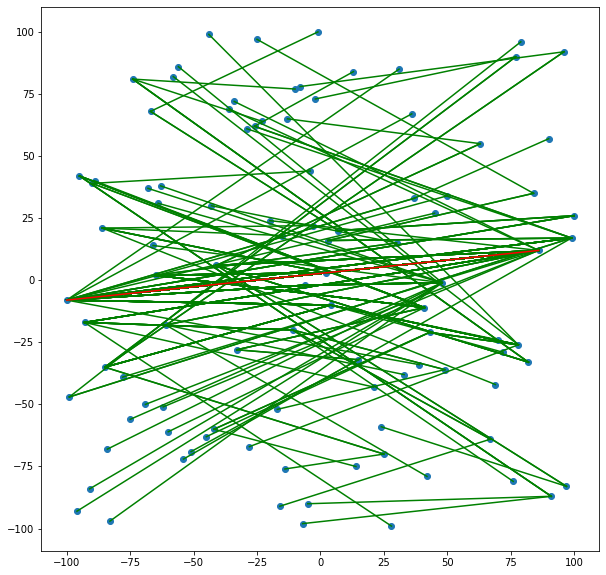
On peut aussi faire afficher les suites de points générées par le théorème en fonction du point de référence choisi au début des calculs. Voici les trajectoires que l’on obtient par exemple pour un ensemble de 
Il reste toutefois plusieurs conjectures à examiner :
– La suite de points que génère le théorème se termine toujours par une boucle sur un unique couple de points.
– La droite optimale trouvée est la plupart du temps unique sauf quelques cas pathologiques à définir.
– Lorsqu’il n’y a que deux points sur la droite optimale alors à un point près il y a autant de points au dessus de la droite qu’en dessous de la droite.
Ce problème n’a pas fini de révéler tous ses secrets. Les détails du théorème présenté dans cet article et sa preuve sont présentés dans le fichier joint ci-dessous.
